
Intel: l'incidente Uber poteva essere evitato? Facciamo i conti
L'incidente Uber poteva essere evitato? I calcoli partendo dall'algoritmo di Intel


Con un editoriale sul sito ufficiale, Intel commenta i sistemi di sicurezza attiva e la loro applicazione nel campo della guida autonoma, in riferimento all'incidente di Uber in Arizona. Il pezzo del professor Amnon Shashua parla dell'applicazione degli algoritmi del produttore al video relativo all'incidente, mostrando come gli algoritmi odierni sarebbero effettivamente in grado di riconoscere il pedone.
L'analisi è stata effettuata facendo lavorare il software su un feed video proveniente da un monitor che eguiva il filmato rilasciato dalla polizia, condizioni ancora più difficili di quelle reali vista l'assenza di moltissimi dati che, sulla scena, erano invece presenti. Nonostante questo, il sistema di riconoscimento dei pedoni è stato in grado di identificare i due ostacoli, differenziando addirittura tra bicicletta (il riquadro verde) e pedone (in bianco), limitandosi a restituire un livello di confidenza indicato con "fcvValid:Low" a causa dell'assenza delle informazioni dei sensori normalmente presenti in un veicolo di produzione e della scarsa qualità delle immagini: un video di un video di una dash-cam caricata non certo alla sua massima qualità.

Il software utilizzato per l'esperimento è lo stesso incluso oggi negli ADAS sui veicoli di produzione. Basandosi sulle immagini diffuse da Intel, si evince che il sistema di riconoscimento dei pedoni è scattato al secondo 3.14 del filmato. Intel stessa conferma nel suo editoriale parlando di "un secondo prima dell'impatto", avvenuto al timestamp 4:09.
L'auto di Uber non ha frenato e secondo i dati ufficiali viaggiava a 40 miglia orarie, l'equivalente di 64 km/h. A questo punto chiamiamo in causa la matematica.
Calcolo spazio di frenata
Prima di fare i conti, va fatta una premessa sul calcolo dello spazio di frenata. La formula per il calcolo prende in considerazioni moltissimi fattori ed è necessaria una semplificazione vista l'impossibilità di accedere ai dati forensi. Tra questi ci sono la velocità, la decelerazione in frenata, il coefficiente d'attrito tra pneumatici e strada, la pendenza, massa del veicolo e condizioni di freni e gomme.
Impossibile conoscerli tutti, per questo prendiamo in considerazione i principali: tra questi è nota la velocità, il coefficiente d'attrito è approssimabile con 0.8 in condizioni ottimali e la decelerazione viene ipotizzata a 9.8 metri al secondo quadrato (1g, dato realistico poiché i sitemi AEB commerciali odierni permettono decelerazioni di 0.9/1.0 g). Convertendo i chilometri orari in metri al secondo, la vettura di Uber viaggiava a 17.88 m/s.
La formula per lo spazio di frenata in metri è velocità al quadrato (in metri al secondo) fratto il doppio del valore di decelerazione moltiplicato per il coefficiente d'attrito.

Basandoci su questi calcoli, l'auto di Uber necessitava di uno spazio di frenata di circa 20 metri. A questo punto bisogna calcolare la distanza. Considerati i tempi indicati poco sopra, il sistema di rilevamento ostacoli ha percepito il pedone con 1 secondo di anticipo rispetto all'impatto. L'auto non ha frenato, quindi assumiamo che in quel secondo abbia viaggiato a velocità costante: la distanza è di circa 18 metri.
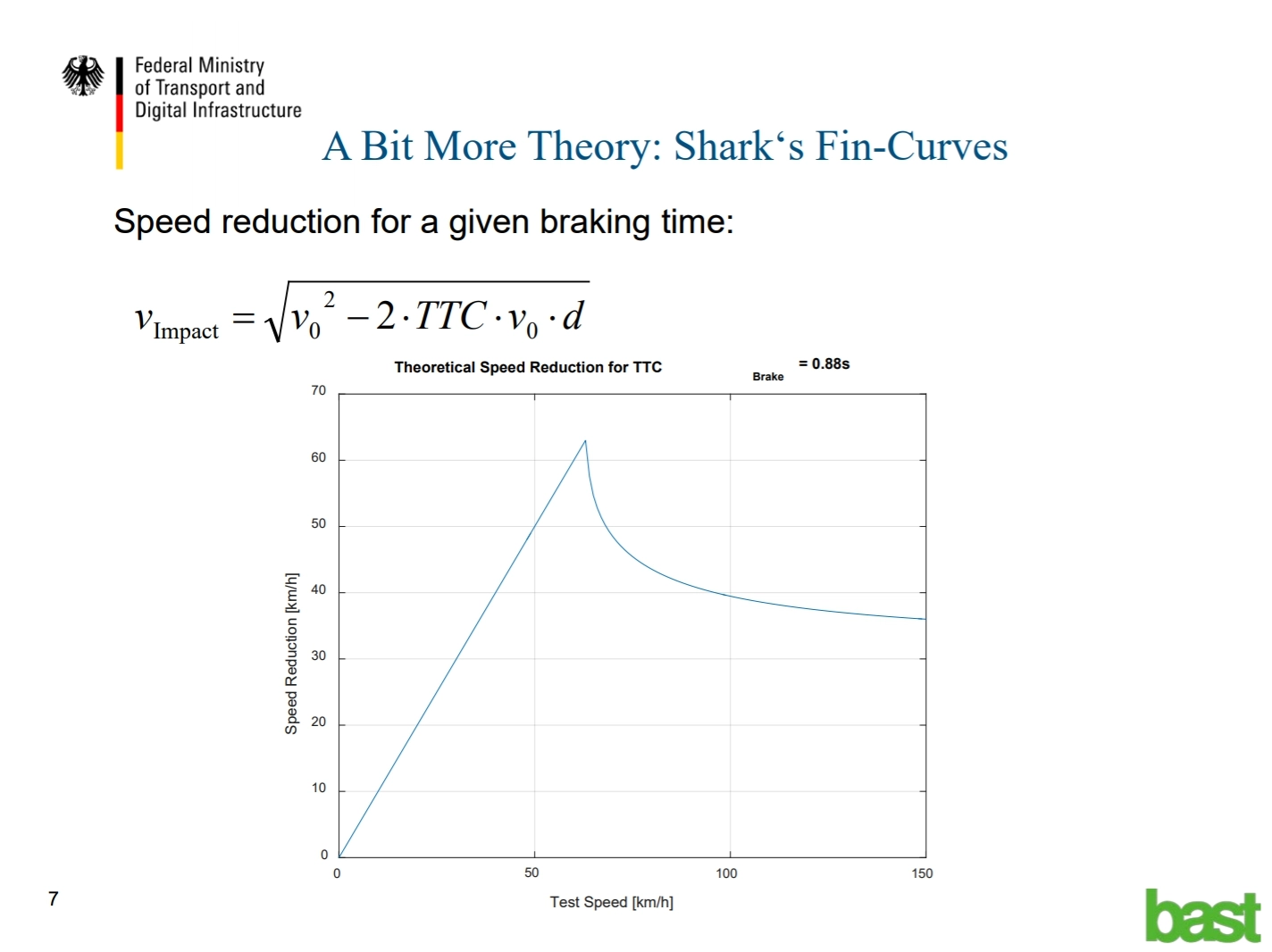
Ipotizzando tempi di attuazione istantanea del sistema di frenata automatica, i 18 metri potevano essere – in linea teorica – sufficienti per evitare l'incidente o almeno ridurne le conseguenze. Nei sistemi di AEB la decisione della frenata d'emergenza è delegata al TTC. Acronimo di Time-To-Collision, il TCC serve al pilota automatico per decidere quando applicare la massima potenza frenante in base ai parametri forniti dal produttore e alla situazione: il sistema misura in tempo reale il coefficiente d'attrito in ogni istante e in base a questi dati adatta la soglia del TTC rispetto alla condizione "zero" ottimale e costante.
La linea teorica si avvicina a quella reale se consideriamo i dati di quattro laboratori NCAP che hanno messo alla prova l'AEB con 47 vetture: la frenata automatica di poco più di 1g è stata ottenuta in 0.4 secondi con un TTC di circa 1 secondo ai 60 chilometri orari di velocità relativa:
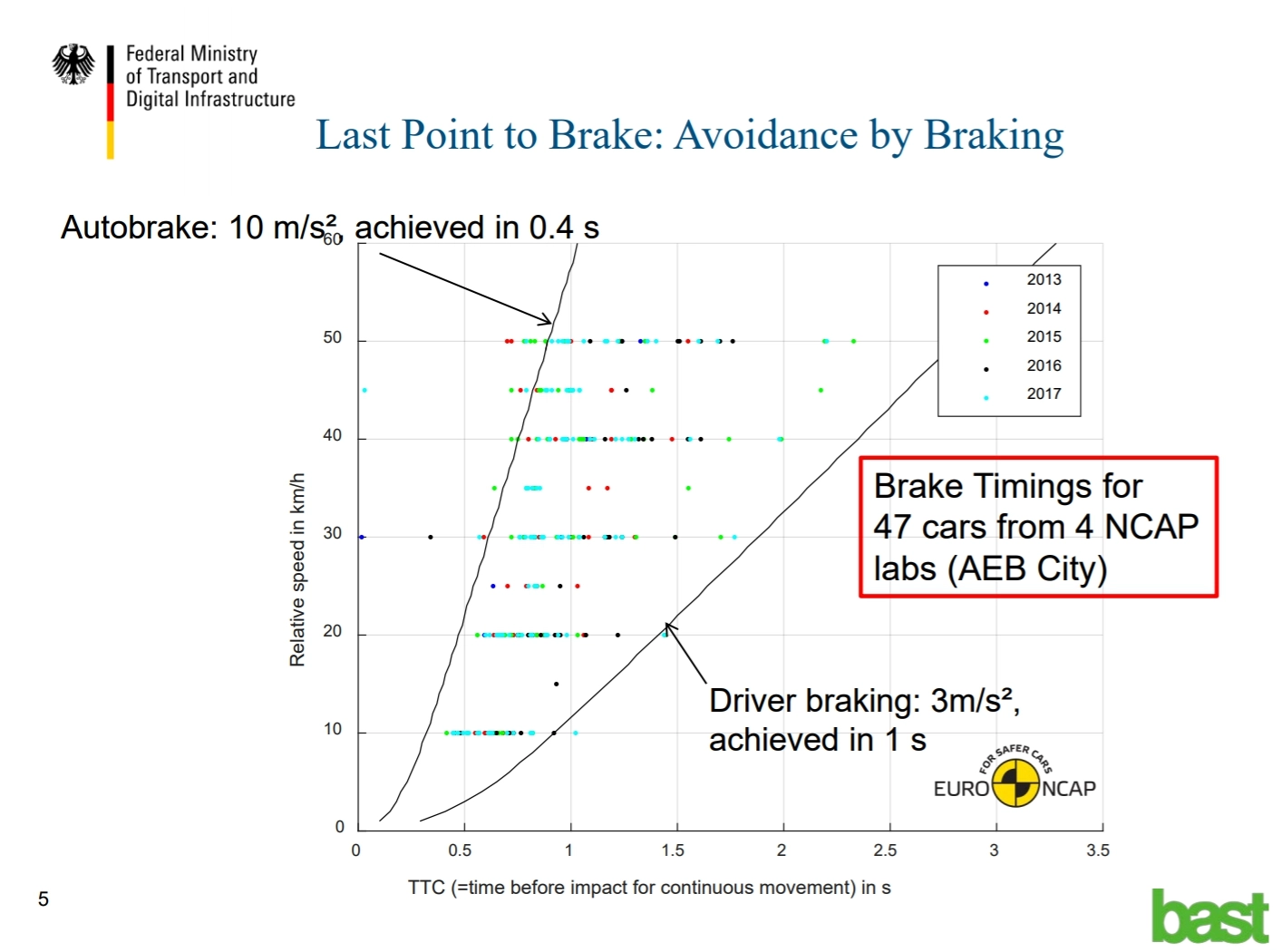
Alla luce di questi dati, quindi, un sistema di AEB funzionante in condizioni ottimali avrebbe avuto a disposizione un margine per ridurre quantomeno la velocità, specie se consideriamo che il tempo di calcolo, l'equivalente del tempo di reazione di un umano, può essere ridotto al di sotto della soglia media indicata nel paragrafo precedente.
L'incidente di Uber non è avvenuto in condizioni ottimali ma l'algoritmo di Intel è riuscito comunque ad effettuare il riconoscimento pur con un numero di dati nettamente inferiore. Cosa non ha funzionato quindi? Purtroppo dovremo ancora attendere per la risposta ma alcune ipotesi parlano del LIDAR disattivato causa volontà di Uber di sperimentare una versione più economica del sistema di guida autonoma.
Quel che è certo è che demonizzare la guida autonoma in base a quanto accaduto è sbagliato visto che, oggi, con una frenata a 0.88 secondi dall'impatto, la tecnologia consente di evitare l'incidente a 49 km/h (velocità relativa), più di quanto riuscirebbe un umano con i migliori tempi di reazione.







